
文 | 极智 GeeTech
近日,工信部首次批准 L3 级自动驾驶商业化运营,通过 L3 级自动驾驶准入申请的两款车型为长安深蓝 SL03 与极狐阿尔法 S6,标志着我国首次允许车辆在特定条件下由系统承担驾驶任务。可以预见的是,2026 年将真正成为 L3 级自动驾驶的“ 量产元年”。
Related articles


值得注意的是,此次明确了 L3 级自动驾驶的权责划分:当车辆在限定路段以不超过 80 公里时速自主行驶时,一旦发生事故,若系统处于激活状态,车企或将承担主要责任。同时,准入要求 L3 级自动驾驶车辆的传感设备必须为“ 前装量产”,后改装车辆无法获得试点资格,从源头保障技术稳定性。

行业普遍认为,L3 级是从“ 辅助驾驶” 到“ 完全自动驾驶” 的重要过渡,后续的 L4 级自动驾驶将实现更大突破—— 在固定区域内,车辆可完全脱离人类干预,真正实现无人驾驶。
这一小步,背后是全球十年的技术博弈。德国早在 2021 年就通过 《自动驾驶法》,明确 L3 系统激活期间事故责任由车企承担,并要求车辆配备“ 黑匣子” 记录运行数据。奔驰 Drive Pilot 系统随后在德国高速公路上线,成为全球首个商业化的 L3 产品。相比之下,中国此次准入虽起步稍晚,却一步切入责任核心,未走“ 测试” 老路,而是直接启动附条件商业化运营。
但现实挑战在于人机共驾的信任建立—— 系统何时退出?驾驶员能否及时接管?未来交通治理将重新定义机器守规与责任切割的边界。
L3 迎来规模化曙光
今年 4 月的上海车展,华为联合赛力斯、阿维塔、奇瑞汽车、北汽新能源、岚图汽车、江汽集团、上汽集团、广汽集团等 11 家车企,在央视直播镜头前谈起了 L3,这些车企基本囊括了中国汽车行业的四大央企和新势力代表,堪称中国新能源汽车行业的“ 半壁江山”。
诸多车企已将 2025 年实现 L3 级有条件自动驾驶落地作为目标。小鹏汽车相关负责人近日表示,已在广州市获得 L3 级自动驾驶道路测试牌照,并启动常态化的 L3 道路测试。2026 年,小鹏汽车计划推出量产的软硬件都达到 L4 级自动驾驶水平的车型。
奇瑞、广汽、极氪三家车企披露 L3 级有条件自动驾驶量产时间表。广汽集团发布了“ 星灵智行”,并宣布在今年第四季度启动首款 L3 自动驾驶车型量产上市销售。奇瑞汽车宣布计划在 2026 年实现量产 L3 级自动驾驶车辆,并发布猎鹰智驾系统。猎鹰 900 搭载 VLA+世界模型新一代智驾系统,AI 算力将达到 1000 TOPS,具备 L3 级自动驾驶能力。
当 L2 已成为标配,L4 尚处技术探索期,L3 这条曾被业界称为“ 恐怖谷” 的跨越之路,终于迎来规模化突破的曙光。
工业和信息化部发布的 《汽车驾驶自动化分级》(GB/T40429—2021) 显示,汽车驾驶自动化技术被划分为从 L0 到 L5 的 6 个等级。其中,L3 级被定义为有条件自动驾驶,即在特定条件下,车辆可以自主完成所有驾驶任务,而驾驶员则转变为监督者的角色,仅在系统请求时介入。
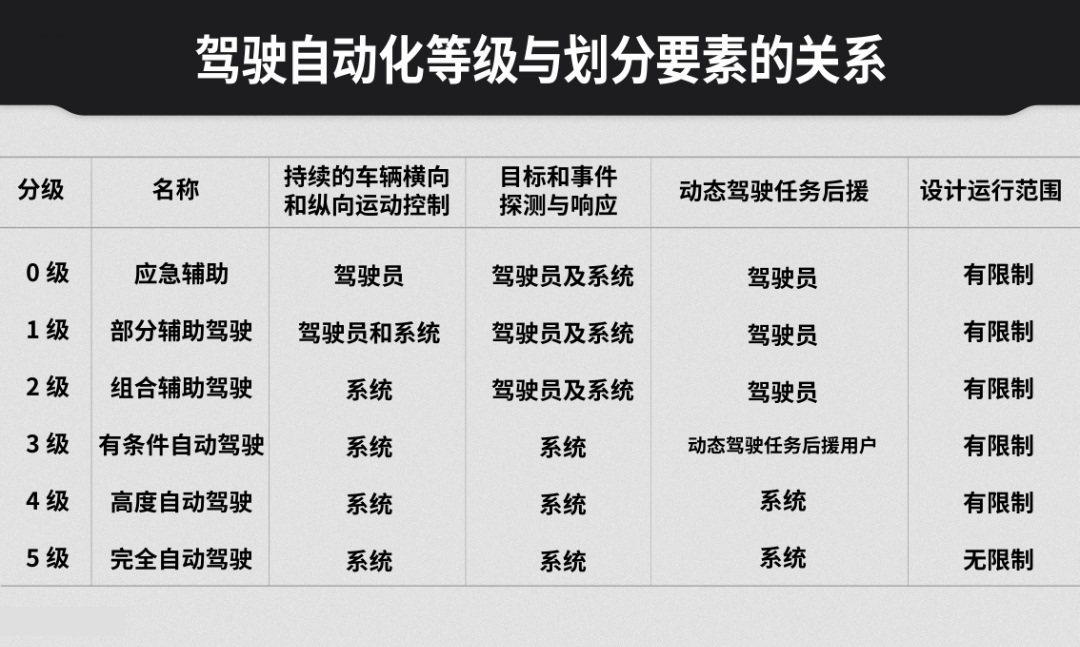
在 L2 级辅助驾驶阶段,驾驶员依旧牢牢掌控着驾驶的主导权,系统仅在特定场景下协助完成部分任务。自适应巡航 (ACC) 能依据前车速度自动调整车速,实现自动跟车,缓解驾驶员长途驾驶时右脚的疲劳;车道居中 (LCC) 则让车辆稳稳地保持在车道中央行驶,减少因偏离车道带来的安全隐患;自动泊车 (APA) 更是新手司机的福音,能自动规划泊车路线,轻松停车入位。
但在 L2 阶段,驾驶员需要时刻保持对车辆的监控,双手不能长时间离开方向盘,随时准备接管车辆。比如在高速上使用自适应巡航和车道保持功能时,一旦遇到路况复杂,如前方出现交通事故、道路施工等情况,系统无法做出合理决策,这时驾驶员必须立刻介入。
而 L3 级自动驾驶意味着汽车可以在特定路况如城市快速路、高速公路上,实现有条件的自动驾驶,车辆可在特定条件下持续执行全部动态驾驶任务。
从驾驶任务的承担来看,L2 级别的智能驾驶系统只是辅助驾驶员完成部分任务,驾驶员仍然是驾驶操作的主体,需要时刻关注路况并准备随时接管车辆。
而 L3 在特定条件下,车辆的自动驾驶系统可以独立完成所有的驾驶操作,驾驶员的角色从主要操作者转变为监督者。
但这并不意味着驾驶员可以完全置身事外。当系统检测到难以处理的复杂情况,比如遭遇暴雨、大雪等恶劣天气导致视野严重受阻,或者遇到道路施工、交通管制等特殊场景时,会提前发出接管提示,此时驾驶员必须迅速响应,重新掌握车辆控制权,确保行车安全。
但关键问题在于,系统何时会退出?驾驶员能否及时接管?国际数据显示,50 岁以上用户从分神到重新掌控车辆平均需 6 秒以上,而系统发出接管请求后留给驾驶员的反应窗口通常不足 10 秒。更现实的是,在低频激活场景下 (有研究称城市道路 L3 可用时间不足 23%),驾驶员极易产生依赖或松懈,反而放大风险。
自动驾驶关键技术跳板
今年,汽车行业的智驾之战明显比往年来得更加猛烈。比亚迪的天神之眼、吉利的千里浩瀚、奇瑞的猎鹰智驾,以及广汽的自动驾驶计划,这些主流车企的动向都说明了,如今的车圈已经是“ 得智驾者得天下” 的时代了。
自 2023 年以来,智驾行业掀起 BEV、端到端技术浪潮后,车企们正逐步将 AI 神经网络融入感知、规划、控制等环节。比起传统基于规则的方案,基于 AI、数据驱动的“ 端到端” 拥有更高能力天花板。
但在端到端模型之外,车企们还辅以了大语言模型、VLM 模型等外挂,提供更强大的环境理解能力,从而提升智驾能力上限。
与此同时,VLA 正在成为重要的一环。VLA 模型拥有更高的场景推理能力与泛化能力,对于智能辅助驾驶技术的演进意义重大。从长远来看,在从 L2 级辅助驾驶向 L4 级自动驾驶的技术跃迁过程中,VLA 有望成为关键跳板。
在提升汽车智能化方面,新势力车企最为激进。在 NVIDIA GTC 2025 大会上,理想汽车发布了新一代自动驾驶架构——MindVLA。它通过整合空间智能、语言智能和行为智能,赋予自动驾驶系统以 3D 空间理解能力、逻辑推理能力和行为生成能力,并计划于 2026 年量产应用。

在 VLA 之前,“ 端到端+VLM” 一直是智驾行业主流技术方案。因为驾驶时需要多模态的感知交互系统,用户的视觉、听觉以及周围环境的变化,甚至个人情感的波动,都与驾驶行为密切相关,所以“ 端到端+VLM” 的技术架构中,端到端系统负责处理感知、决策和执行的全过程,而 VLM 则作为辅助系统,提供对复杂交通场景的理解和语义解析,但两者相对独立。
比如理想“ 端到端+VLM” 双系统架构方案,其基于丹尼尔· 卡尼曼 (Daniel Kahneman) 在 《思考,快与慢》 中提出的人类两套思维系统理论,将端到端系统 (相当于系统 1) 与 VLM 模型 (相当于系统 2) 融合应用于自动驾驶技术方案中,赋予车端模型更高的性能上限和发展潜力。
其中,系统 1 即端到端模型,是一种直觉式、快速反应的机制,它直接从传感器输入 (如摄像头和激光雷达数据) 映射到行驶轨迹输出,无需中间过程,是 One Model 一体化的模型。系统 2 则是由一个 22 亿参数的 VLM 视觉语言大模型实现,它的输出给到系统 1 综合形成最终的驾驶决策。
而小鹏汽车将云端模型工厂划分为四个车间,依次进行模型的预训练、后训练、模型蒸馏以及车端部署。理想则选择了先进行视觉语言基座模型的预训练,随后进行模型蒸馏,最后通过驾驶场景数据进行后训练和强化学习。两种不同的技术路线带来了不同的训练成本与效率,正是这种差异使得两家车企在市场上形成了强烈的对比。
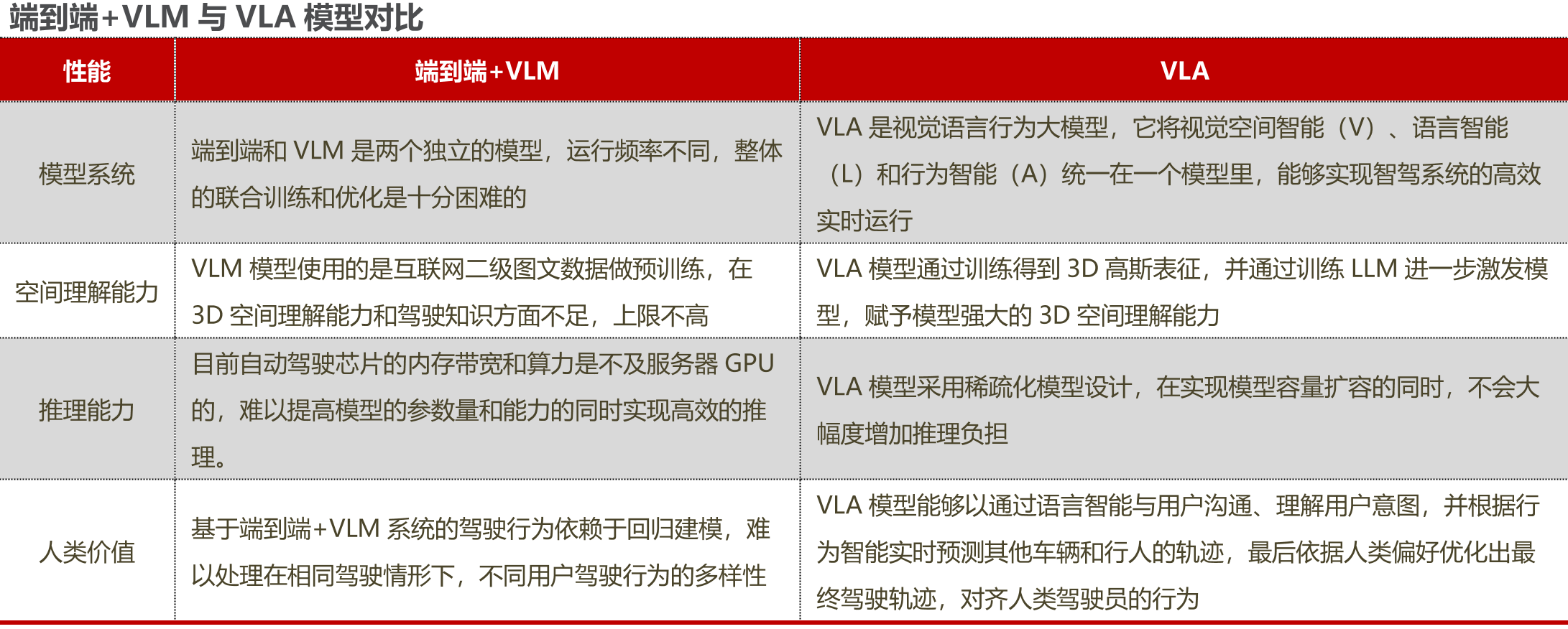
虽然“ 端到端+VLM” 大幅提升了智驾水平,但仍有很多问题。比如,端到端和 VLM 要进行联合训练比较困难,此外还有对 3D 空间理解不够、驾驶知识和内存带宽不足、难以处理人类驾驶的多模态性等问题。
而 VLA 通过统一的大模型架构,将感知、决策、执行无缝串联,形成“ 图像输入-语义理解-类人决策-动作输出” 的闭环,可以同步提高智驾的上限和下限,实现空间、行为和语言的统一。
在推理方面,VLA 模型的能力要远高于“ 端到端+VLM”。VLA 整合了 VLM 的感知能力和端到端模型的决策能力,还引入了“ 思维链” 技术。这使得它具备了全局上下文理解与类人推理能力,能够在面对复杂的交通规则、潮汐车道、长时序推理等特殊场景时,像人类驾驶员一样进行思考和判断。
例如,在推理时长方面,传统的基于规则 (rule-based) 方案只能推理 1 秒钟的路况信息并做出决策控制;端到端 1.0 阶段的系统能够推理未来 7 秒的路况,而 VLA 模型则能够对几十秒的路况进行推理,显著提升了智能辅助驾驶系统的决策能力和适应性。
正因如此,VLA 被业界认为是端到端 2.0 的主要技术形态。目前,VLA 尚处于发展阶段,除 DeepMind 的 RT-2 外,还包括 OpenVLA 模型、Waymo 的 EMMA、Wayve 的 LINGO-2、英伟达 NaVILA 等。这其中,Waymo 的 EMMA 和 Wayve 的 LINGO-2 主要面向的是车载领域,RT-2、OpenVLA 和 NaVILA 则主要面向机器人领域。
越来越高的汽车智能化门槛
对于车企而言,尽可能地自研汽车智能化的每个部分,从而对汽车智能系统的每一寸都了如指掌,这是每个车企的底气所在。
传统汽车时代整车厂并不去开发软件,而是靠着一个一个供应商提供软硬件一体的“ 黑盒子” 实现定义的功能。但当 AI 时代来临,中央集成电子电气架构、大算力芯片、大模型相继上车,汽车从“ 机电产品” 变成了“ 智能体”,用户需求与体验被重新定义。

用户对智能驾驶技术的关注点,早已从“ 能不能开” 升级为“ 开得是否安全”。例如,在斑马线避让行人、路口大车变线等复杂场景中,车辆能够通过实时交互和动作的可视化展示,让用户更好地理解系统的决策过程;遇到异常操作时,车辆能够及时向用户解释系统的判断依据和应对措施;在智能驾驶场景下,车辆能够根据行驶状态自动进行灯光调整,一定程度上向周围车辆和行人传达行驶意图,增强行车安全性。
对不同车企而言,更适合进行自研的项目主要还是包括三大类,一是核心竞争技术:如动力电池技术、电动驱动系统、自动驾驶算法等,它们直接关系到车辆的性能和安全,是提升品牌竞争力的关键;二是差异化技术,即能够明显区别于竞争对手的技术,如独特的用户界面设计、车联网服务等,可以增强消费者的品牌忠诚度;三是高成本技术部件:自研可以减少对外部供应商的依赖,降低成本,如电池、高性能自动驾驶芯片等。
虽然车企自研渐成趋势,但这条道路并不一定会是坦途,往往伴随着高昂的研发成本、漫长的技术积累以及未知的市场风险。对于大多数车企而言,如何在自研与配套之间找到最佳平衡点,既保证技术领先性,又控制好成本是一项考验。此外,随着技术的不断迭代,如何保持自研技术的持续创新力,避免被市场淘汰,也是车企需要面对的重要课题。
由于自研项目离不开大量时间和资金的投入,车企势必要在自主研发和技术合作中找到平衡点。因此,车企首先需要做好战略规划和优先级设定,明确自研项目的长远目标和优先级,确保研发资源投入最有潜力和最符合公司战略方向的项目。
另外,自研项目通常具有高风险和高回报的特性,车企可以采用分阶段的研发和投资策略,即在每个研发阶段完成后进行评估和调整,根据项目的进展和市场反馈逐步投资,这样可以有效控制风险和成本。
L3 级自动驾驶商业化的启幕,不仅是方向盘短暂“ 松手” 的技术突破,更是人类与智能机器共处的全新起点。这扇门的开启,没有终点,只有持续探索的新征程—— 在技术迭代与制度完善的双重驱动下,自动驾驶正一步步从梦想走进现实,重塑未来出行的全新形态。
更多精彩内容,关注钛媒体微信号 (ID:taimeiti),或者下载钛媒体 App