
文 | 山自
2025 年 12 月 20 日,旧金山遭遇一场罕见的大规模停电。太平洋煤气与电力公司 (PG&E) 一座变电站突发火灾,导致全市约 12.5 万用户断电,覆盖西区、里士满、海特-阿什伯里、中国城等近三分之一区域。交通信号灯集体熄灭,Muni 公交停运,市长丹尼尔· 卢瑞紧急呼吁市民非必要不出行。
Related articles

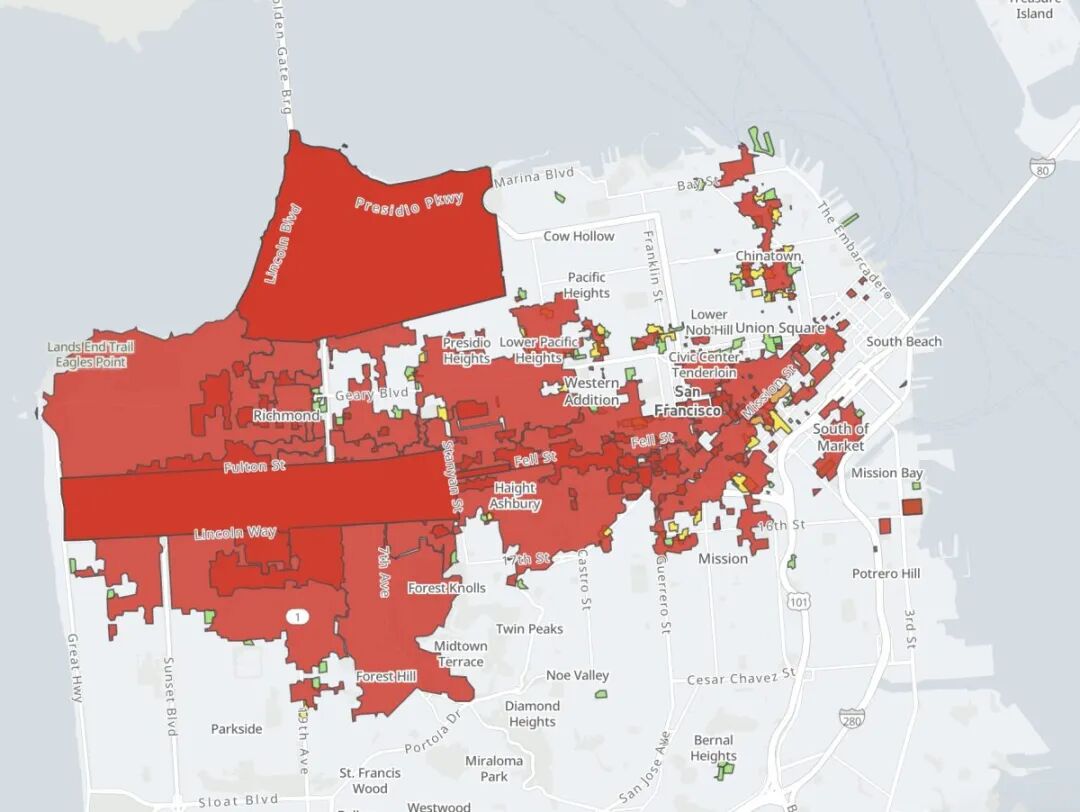

2025 年 12 月 20 日下午 4:50 的 PG&E 停电图
然而,在这场城市应急事件中,最引人注目的并非人类司机的混乱应对,而是——Waymo 自动驾驶车队的集体“ 宕机”。
社交媒体上,视频疯传:多辆白色 Waymo 车辆在漆黑潮湿的十字路口一动不动,红色尾灯在夜色中闪烁,后方排起长龙,人类司机或鸣笛催促,或无奈绕行。有用户调侃:“ 停电摧毁了 Waymos RIP。” 更有观察者尖锐指出:“ 看起来它们根本没接受过停电训练。”

停电期间,一辆 Waymo 被困在路上
次日,Waymo 官方承认已暂停旧金山服务,并解释称:“ 由于大范围停电,车辆比平时停留更长时间以确认受影响交叉路口的状态。” 但这一轻描淡写的回应,掩盖不了一个更深层的技术危机:当外部数字基础设施崩塌,当前主流自动驾驶系统为何如此脆弱?
不是“ 故障”,而是系统性脆弱链的暴露
从技术角度看,Waymo 车辆在停电夜的停滞,并非单一模块失效,而是一条典型的“ 脆弱性传导链”:
L4 级自动驾驶依赖多传感器融合 (摄像头+激光雷达+毫米波雷达)。在正常工况下,交通信号灯提供结构化、高确定性的规则输入—— 红灯停,绿灯行。这种强语义信号极大简化了决策逻辑。

但停电后,红绿灯物理消失,激光雷达点云中不再有对应结构,摄像头在低照度下识别能力骤降。更关键的是,系统失去了“ 规则锚点”,被迫将决策权重转移至对无序人类行为的预测—— 而这正是当前 AI 的短板。
美国交规规定,信号灯失效时应视为“All-Way Stop”(所有方向停车后依次通行)。但执行这一规则需精准判断“ 谁先停稳”“ 谁有通行意图”,并与其他可能不守规的人类司机进行动态博弈。
现有决策规划算法严重依赖预设规则和格式化场景理解。面对混乱路口中抢行、犹豫、变道的人类车辆,系统陷入高不确定性下的保守死循环:“ 无法 100% 确认安全 → 不行动 → 持续等待”。
有分析指出,伴随停电的蜂窝网络波动或实时交通数据中断,可能是另一重打击。Waymo 等公司依赖远程协助 (Tele-assist) 处理边缘场景。一旦通信中断,车辆不仅“ 看不见”,还成了“ 信息孤岛”,无法获取后台指令或路径重规划。
更讽刺的是,硬件冗余无法弥补“ 环境模型” 的缺失。系统设计默认“ 世界有规则”,却未为“ 规则本身消失” 构建降级运行机制。其“ 最小风险状态”(Minimal Risk Condition) 策略—— 原地停车—— 在单车场景下合理,但在车队规模部署时,反而引发系统性交通堵塞。
李飞飞:数据与算法的“ 失衡” 才是根源
这场“ 黑夜测试” 恰如一面镜子,映照出李飞飞近期关于 AI 核心矛盾的深刻洞察。
在近期与钛媒体的对话中,李飞飞明确指出:
她进一步强调,行业普遍存在“ 算法比数据重要” 的认知偏差—— 算法工程师薪资更高、更受追捧,而数据工作被视为“ 不够性感”。但现实是:所有 AI 从业者都承认,数据至少具有同等价值。
Waymo 事件正是这一“ 协同失灵” 的典型案例。
据 Tiger Global 泄露文件,Waymo 目前每周提供 45 万次 Robotaxi 服务,累计路测里程已达数亿英里。但这些数据高度集中于“ 正常工况”:电力稳定、信号有效、人类基本守规。
而“ 全域大规模停电” 这类系统性边缘场景(Systematic Corner Case),因其低概率、高成本、难复现,在训练集中几乎空白。算法从未在足够多样本上学习“ 规则失效时该如何反应”,自然在真实世界中“ 懵圈”。
更深层问题在于,当前系统缺乏一个能理解物理与社会规则如何动态演化的世界模型(World Model)。
理想的世界模型应能推理:“ 停电 → 信号灯失效 → 人类行为从规则主导转为博弈主导 → 路口通行效率下降 → 我应采取更灵活但谨慎的策略 (如跟随前车缓慢蠕动)”。
但现有系统只是感知-预测-规划的流水线拼接,没有因果推理、没有心智理论(Theory of Mind)。当输入异常,算法便在“ 不确定性过高” 的循环中空转,无法调用常识进行降级决策。
这正是李飞飞所说的:“ 数据和算法就像科学家的两条腿,少哪条都走不远。”Waymo 有强大的算法之腿,却在关键数据维度上跛足前行。
为世界模型构建“ 黑暗训练集”
李飞飞预测,未来 1-2 年 AI 将迎来技术爆发,突破口正在于数据与算法的新型协同机制。对自动驾驶而言,这意味着一场数据战略的范式革命。
行业必须放弃对总里程的迷信,转而系统性构建关键场景数据库,包括:
这些场景需通过定向实采、众包上报与仿真生成相结合的方式积累。
真实停电难以复现,但高保真仿真可以。利用生成式 AI 与数字孪生技术,可在虚拟旧金山中反复模拟“ 信号灯全灭+通信中断+人类抢行” 的复合场景,生成海量训练样本。
Wayve、Covariant 等公司已证明,高质量合成数据可显著提升模型鲁棒性。未来,自动驾驶公司的核心竞争力,或将体现在其“ 黑暗场景生成引擎” 的能力上。
世界模型需要理解“ 为什么”,而不仅是“ 是什么”。这意味着数据标注需从传统的目标检测、语义分割,升级为
意图标注:行人挥手是让行还是求助?
因果关联:车辆减速是因为前方有障碍,还是准备变道?
社会规范建模:在无信号灯路口,本地驾驶文化是“ 先到先走” 还是“ 右侧优先”?
这类“ 高阶语义数据” 将成为训练世界模型的关键燃料。
事件也警示:过度依赖云端、高精地图和实时通信,会引入单点故障风险。未来系统需支持更强的边缘智能—— 即使断网断电,也能基于局部感知进行长时序风险推演。
相应地,训练数据应包含大量“ 通信降级” 条件下的成功处置案例,让模型学会在信息受限时依然稳健决策。
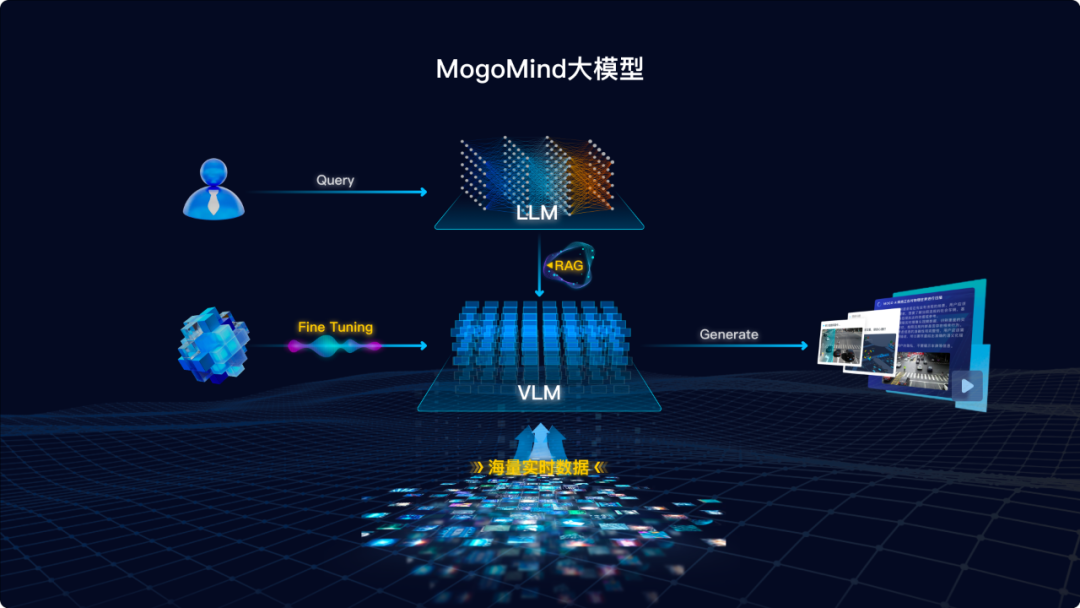
在探索世界模型落地路径的过程中,国内自动驾驶企业蘑菇车联的实践值得关注。其自研的 MogoMind 大模型 正尝试构建一个融合物理规律、交通规则与社会博弈常识的统一认知框架。不同于传统模块化架构,MogoMind 通过端到端训练,在感知、预测与决策之间建立更紧密的协同机制。更重要的是,蘑菇车联同步打造的 AI 网络,一套覆盖车端、边缘与云端的分布式智能基础设施—— 为大模型提供了持续进化的数据闭环:即使在局部通信中断或信号失效场景下,车端模型仍能基于本地化世界表征进行稳健推理。这种“ 物理世界大模型+AI 网络” 的双轮驱动,或将成为应对“ 旧金山式黑夜” 的中国方案。
从“ 规则拟合者” 到“ 世界理解者”
旧金山那个停电的夜晚,Waymo 车队停滞的红灯,像一串刺眼的警示符,照亮了当前自动驾驶技术的边界。或许,真正的智能,不是在阳光明媚的规则世界中完美运行,而是在黑夜混沌中依然知道如何前行。
未来的自动驾驶系统,不应只是执行指令的机器,而应成为能深度理解物理世界、揣摩人类意图、在不确定性中稳健决策的“ 数字生命体”,让城市运行更高效,让交通管理更智能,让人车出行更安全。
更多精彩内容,关注钛媒体微信号 (ID:taimeiti),或者下载钛媒体 App